- 產品
- 供應
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||
AB羅克韋爾電機VPL-B1303C-CJ12AS

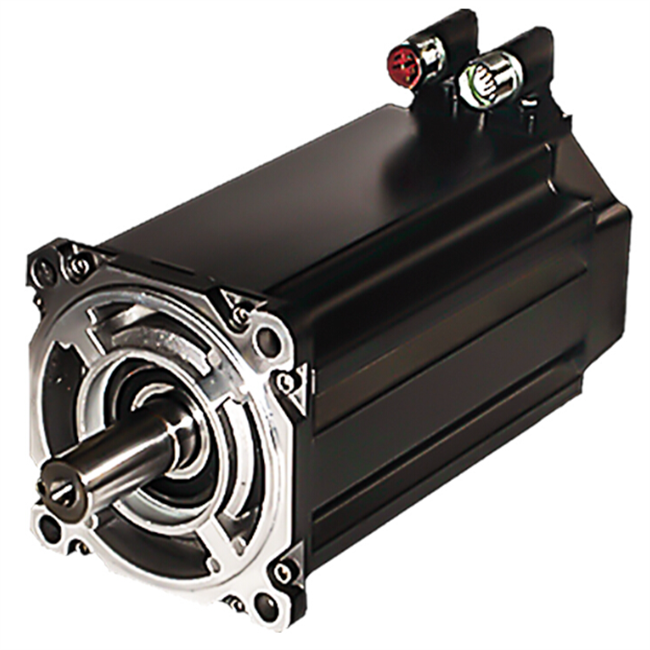
AB VPL 系列伺服電機的工作原理基于電磁感應和閉環控制理論,具體如下:
電磁感應原理:AB VPL 系列伺服電機通常為永磁同步電機。當定子繞組通入三相交流電時,會產生旋轉磁場。轉子上裝有高性能的稀土永磁體,在旋轉磁場的作用下,轉子導體切割磁感線,產生感應電動勢和感應電流,進而產生電磁力,使轉子在電磁力的作用下跟隨旋轉磁場旋轉。
閉環控制原理:控制信號輸入:控制器(如 PLC 或運動控制器)發送控制信號,指示電機的運動方向、速度或轉矩目標。
反饋信號檢測:電機軸上安裝有編碼器,它能夠實時檢測電機轉子的位置、速度等信息,并將這些信息反饋給驅動器。
誤差計算:驅動器將編碼器反饋的實際值與控制器發送的目標值進行比較,計算出誤差值。
控制信號調整:驅動器根據誤差值,采用 PID(比例 - 積分 - 微分)控制算法或其他控制策略,調整輸出給電機的電壓和電流信號,以改變電機的運行狀態,減小誤差。
電機響應:電機根據驅動器調整后的電壓和電流信號,改變自身的轉速、轉矩或位置,使實際運行狀態不斷接近目標值。這個過程不斷循環,直到電機達到所設定的目標狀態,從而實現的運動控制。

VPL-B0752E-CK12AA
VPL-B0753E-CK12AA
VPL-B0631T-PK12AA
VPL-B0633T-PK12AA
VPL-B0633T-PJ12AA
VPL-B0753E-CJ12AA
VPL-A1003F-CK12AA
VPL-A1152E-PK14AA
VPL-A1152F-PK12AA
VPL-B1304E-PJ14AA
VPL-B1304C-PJ14AA
VPL-A0631E-PK12AA
VPL-B1651F-PK12AA
VPL-B1304E-CJ14AA
VPL-B1654B-CK14AA
VPL-B0633M-PK14AA
VPL-A0631E-PK14AA
VPL-B0753E-PK14AA
VPL-B1152F-CK14AA
VPL-B0632T-CK12AA
VPL-B1306F-CJ14AA
VPL-B1303F-CJ14AA
VPL-B0753M-PK14AA
VPL-B0632T-PK12AA
VPL-B1653C-CK12AA
VPL-B0632T-CJ12AA
VPL-B1003T-PK14AA
VPL-B1152F-CJ14AA
VPL-B0751M-PK12AA
VPL-A0631E-CK12AA
VPL-B0632T-CJ14AA
VPL-A0631E-CJ12AA
VPL-B0752E-PK12AA
VPL-B0631T-PK14AA
VPL-A1001M-PJ14AA
VPL-B1304C-PK14AA
VPL-B0632F-PK12AA
VPL-B1652C-CK14AA
VPL-B1153F-CK14AA
VPL-B0753E-PK12AA
VPL-B0753E-PJ12AA
VPL-B1303F-CK14AA
VPL-B0632F-CK12AA
VPL-B0752F-PK12AA
VPL-B1003C-PK14AA
VPL-B1653C-PK12AA
VPL-A0753C-CJ12AA





