- 產(chǎn)品
- 供應(yīng)
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||
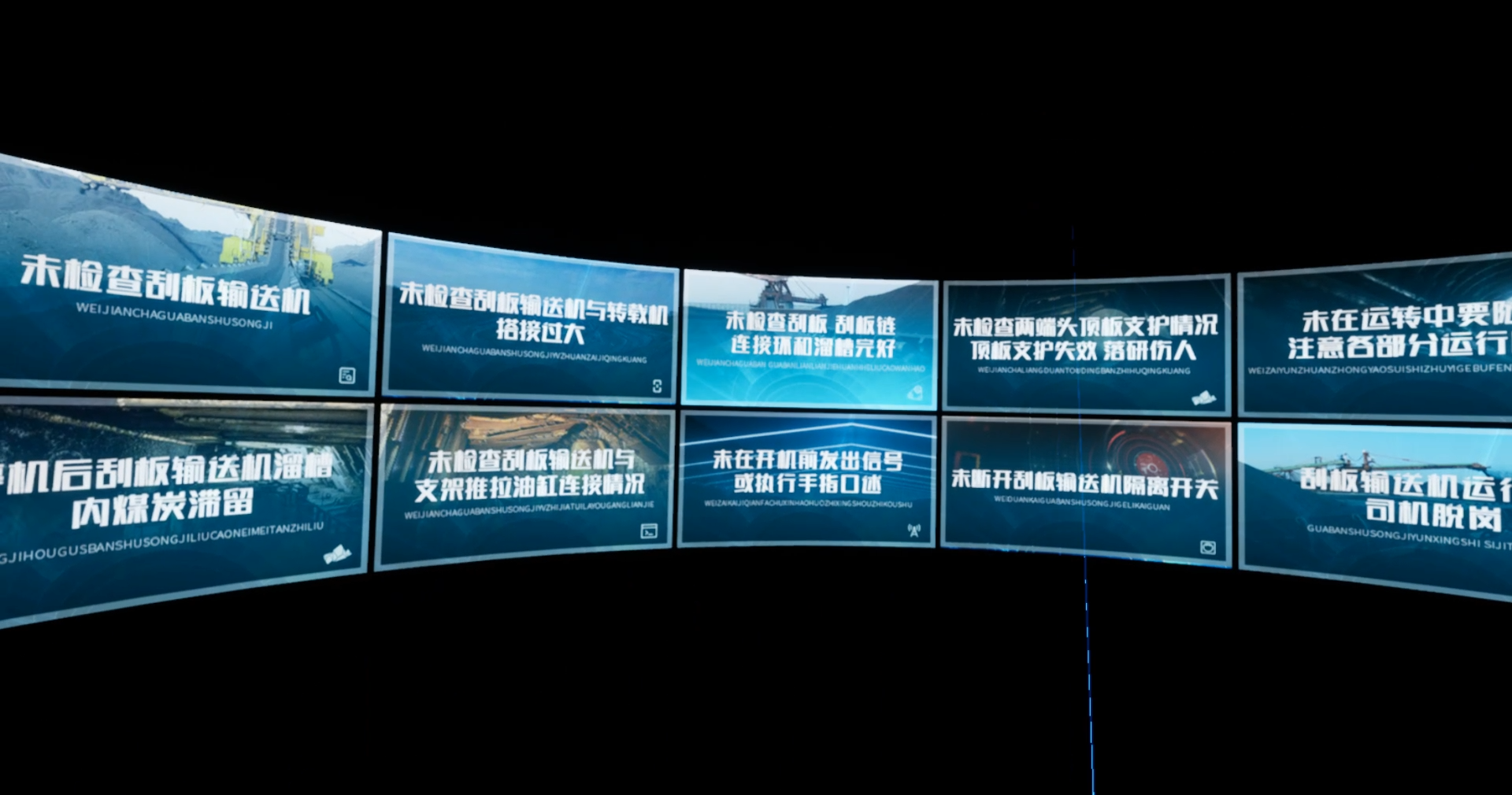
刮板輸送機(jī)司機(jī)作業(yè)危險(xiǎn)源排查模塊包括:
1. 未檢查刮板輸送機(jī)
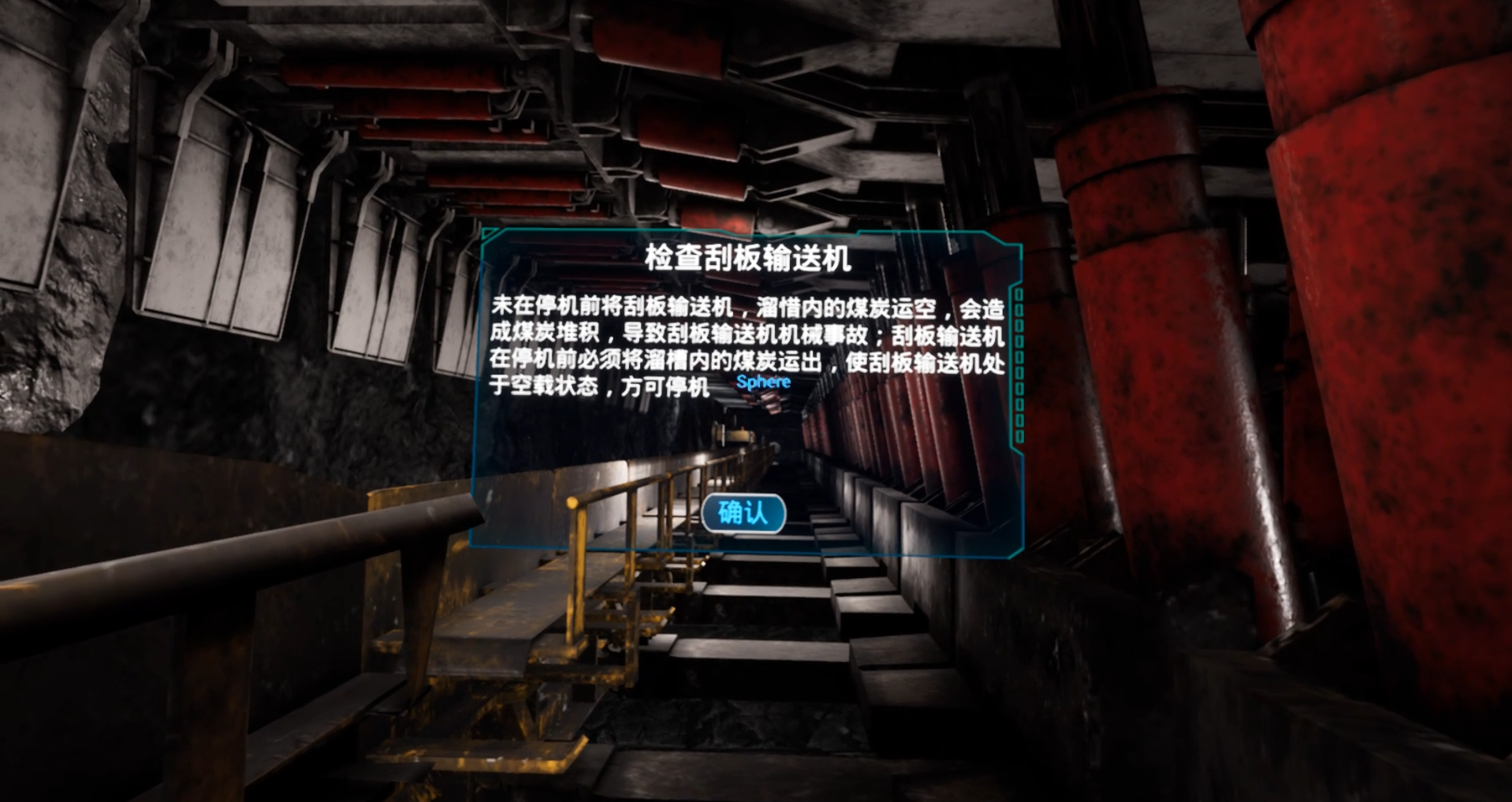
2. 停機(jī)后刮板輸送機(jī)溜惜內(nèi)煤炭滯留
3. 未檢查刮板輸送機(jī)與轉(zhuǎn)載機(jī)搭接過(guò)大
4. 未檢查刮板輸送機(jī)與支架推拉油缸連接情況
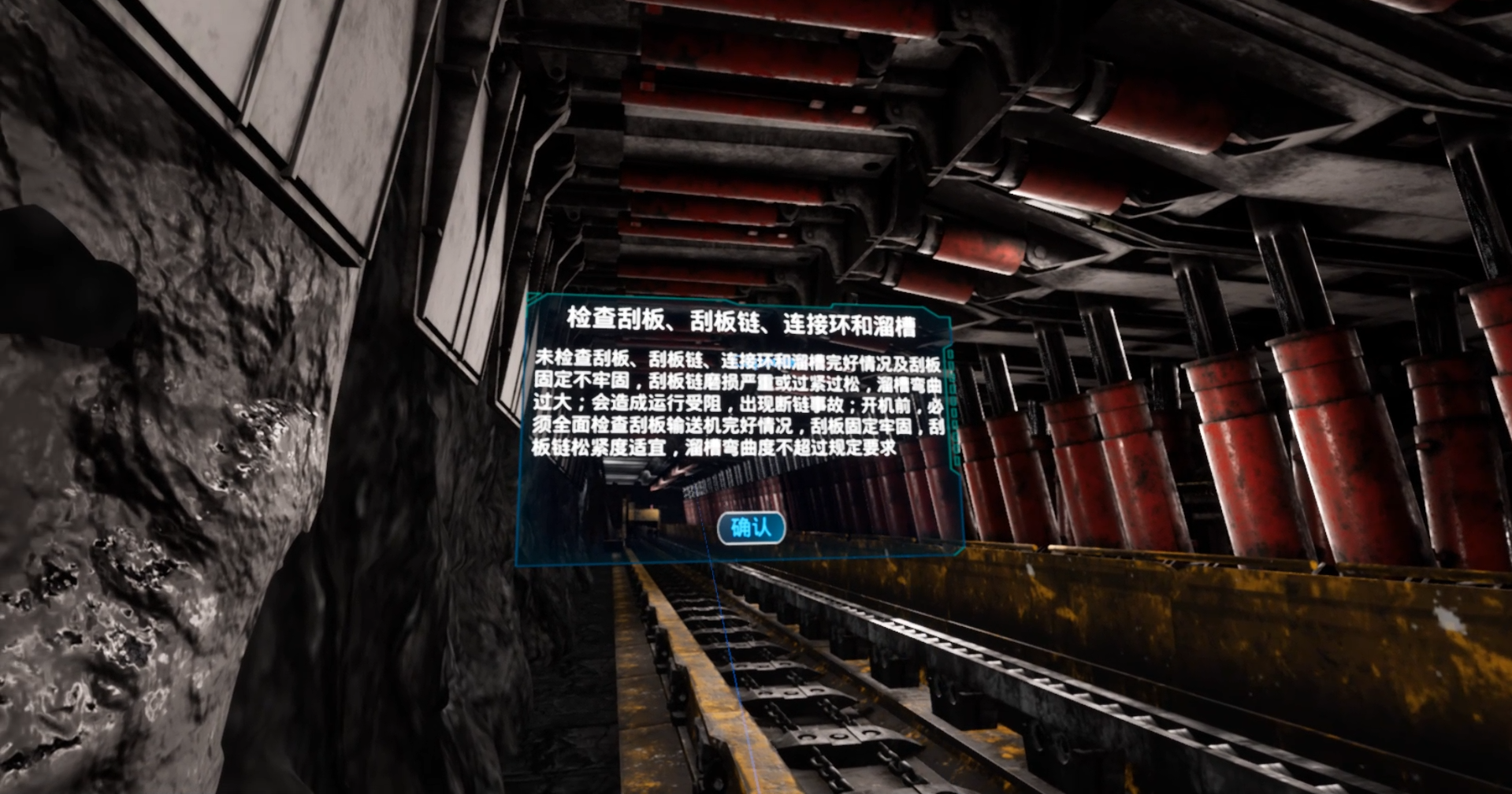
5. 未檢查刮板、刮板鏈連接環(huán)和溜槽完好
6. 未在開(kāi)機(jī)前發(fā)出信號(hào)或執(zhí)行手指口述
7. 未檢查兩端頭頂板支護(hù)情況頂板支護(hù)失效落研傷人
8. 未斷開(kāi)刮板輸送機(jī)隔離開(kāi)關(guān)
9. 未在運(yùn)轉(zhuǎn)中要隨時(shí)注意各部分運(yùn)行情況
10. 刮板輸送機(jī)運(yùn)行時(shí)司機(jī)脫崗
1. 用戶(hù)登陸權(quán)限認(rèn)證;
2. 系統(tǒng)分為培訓(xùn)模式和考核模式,考核模式下,系統(tǒng)可提交用戶(hù)的考核成績(jī)到后臺(tái)管理系統(tǒng);
3. 支持用戶(hù)通過(guò)VR手柄在虛擬環(huán)境中與虛擬的裝備進(jìn)行互動(dòng)操作;
4. 支持用戶(hù)在
5. 系統(tǒng)采用真實(shí)三維場(chǎng)景中進(jìn)行VR手柄的六自系統(tǒng)中通過(guò)手柄操作游覽;
6. 系統(tǒng)支持文字及語(yǔ)音提示操作;由度交互操作。
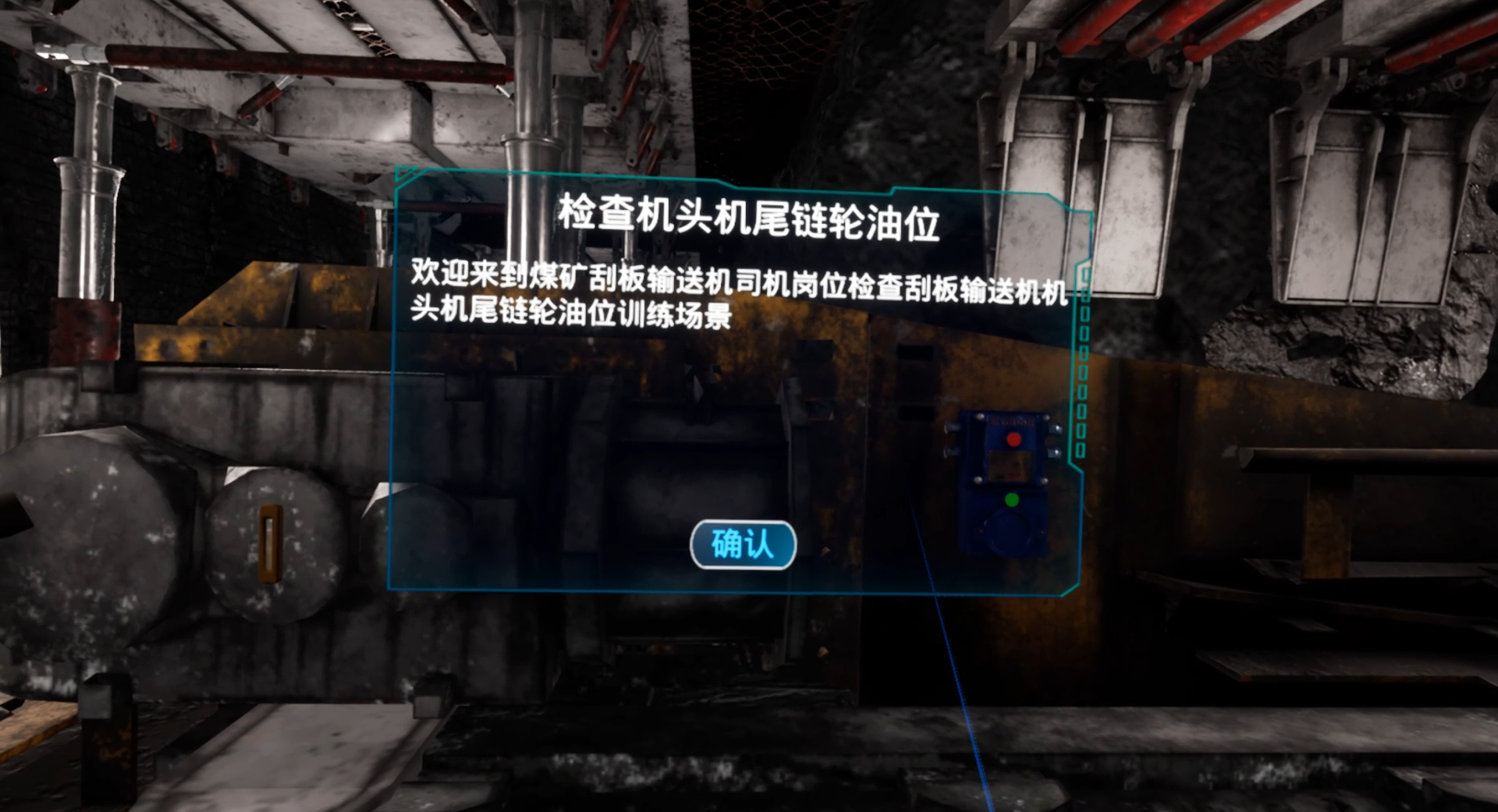
系統(tǒng)采用UnrealEngine引擎進(jìn)行開(kāi)發(fā),借助PBR材質(zhì),對(duì)井下作業(yè)環(huán)境進(jìn)行逼真的虛擬現(xiàn)實(shí)呈現(xiàn),采用粒子系統(tǒng)模擬作業(yè)過(guò)程中的噴水、粉塵等物效。



員產(chǎn)品")


入企業(yè)網(wǎng)站")