- 產品
- 供應
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||

桁架機械手按聯機的方式分為單機桁架機械手、雙聯機桁架機械手、多聯機桁架機械手自動線等幾種型號;桁架機械手按負載重量又分為輕型桁架機械手、重型桁架機械手這兩種型號。至于選用哪種桁架機械手型號,要根據產品的工藝和加工時間、產品的形狀和重量以及用戶的實際需要來選定。
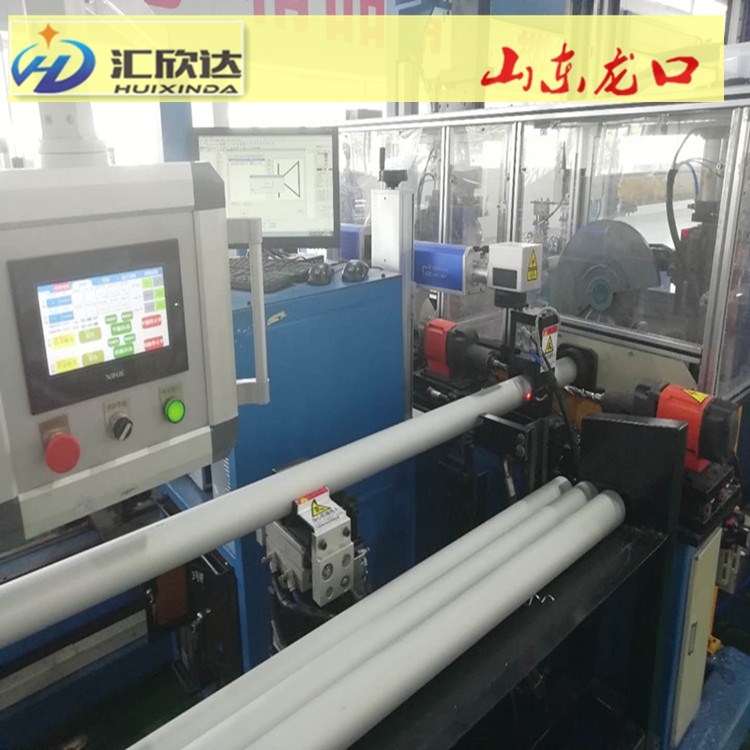
上海磨床桁架上下料機械手 機器人天軌匯欣達 磨床桁架上下料機械手 機器人天軌
在選擇合適伺服電動機的情況下,根據物料運動的距離和運行節拍,計算出伺服系統的位移和軌跡,對驅動器PID參數進行動態調整。桁架機械手根據接收到的位移、速度指令,經變化、放大并調整處理后,傳遞給運動單元,通過光纖傳感器對運行狀態進行實時檢測,在高速搬運過程中,運動部件在極短的時間內到達給定的速度,并能在高速行程中瞬間準停,通過高分辯率式編碼器的插補運算,控制機械誤差和測量誤差對運動精度的影響。

?搬運機器人-技術數據:

上海磨床桁架上下料機械手 機器人天軌匯欣達磨床桁架上下料機械手 機器人天軌











