- 產(chǎn)品
- 供應
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||
多邏輯多目標管理技術
在很多機器人引導項目中,機器人需要涉及到多邏輯和多目標的控制。一個機械手需要抓取不同的產(chǎn)品,然后放到不同的目標位置去,如下圖說明的情況。
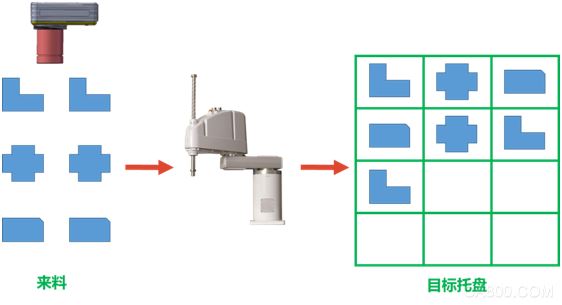
由于目標托盤有多個點位,需要根據(jù)產(chǎn)品的類型,和需要的目標位置按順序放置,目標位置管理比較復雜,這部分工作可以由機器人管理,但是機器人程序的維護和修改都比較麻煩,如果進一步,目標托盤的位置也不是固定的,如下圖的情況
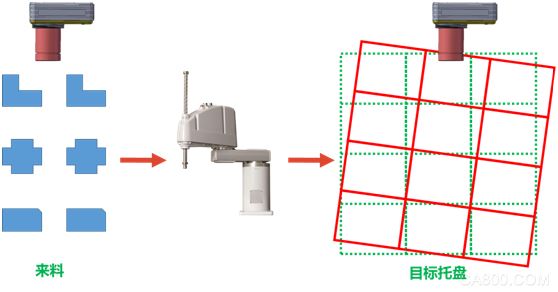
對于這個需求,通常的控制邏輯是:
左邊相機將產(chǎn)品坐標和型號送給機械手,右邊相機將目標托盤的位置變化送給機械手,機械手根據(jù)實現(xiàn)預設的目標網(wǎng)格和托盤位置變化計算變化后(紅色網(wǎng)格)的托盤位置,然后再根據(jù)產(chǎn)品型號放置到不同的位置去。
這種方式在實際操作中存在兩個麻煩的地方:1、很多機械手不支持根據(jù)偏差量(平移和旋轉),計算坐標變換的功能(根據(jù)綠色網(wǎng)格和偏差量計算紅色網(wǎng)格的位置);2、產(chǎn)品放置精度是相對于托盤而言,而目標托盤在機械手坐標系中的位置無法精確確定。
這對這種復雜的場景,MicroMatch智能相機系統(tǒng)將多邏輯和多目標管理的功能全部集成到軟件里面,不需要機械手模塊讀取產(chǎn)品類型,也不需要機械手根據(jù)變化量計算計算托盤的位置變化,直接將對應產(chǎn)品需要放置的最終目標位置一次送給機械手,極大的減小視覺和機械手之間的配合復雜度。


品")


網(wǎng)站")







