- 產(chǎn)品
- 供應(yīng)
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||
機(jī)器人旋轉(zhuǎn)補(bǔ)償技術(shù)
在實(shí)際機(jī)器人引導(dǎo)項(xiàng)目中,機(jī)械手上都需要根據(jù)抓取的產(chǎn)品定制不同的“夾具”,這就給高精度的機(jī)器人引導(dǎo)項(xiàng)目帶來(lái)了一個(gè)非常大的問(wèn)題,就是夾具的中心和機(jī)械手的旋轉(zhuǎn)中心存在偏差。這個(gè)偏差直接導(dǎo)致在很多涉及到旋轉(zhuǎn)的項(xiàng)目上精度下降很多,而校正這個(gè)偏差非常復(fù)雜。
部分國(guó)外的機(jī)器人控制系統(tǒng)都支持旋轉(zhuǎn)中心補(bǔ)償技術(shù),但是這個(gè)補(bǔ)償只能通過(guò)目視完成,“目視”矯正方式將嚴(yán)重降低系統(tǒng)精度,只能在一定程度上減小這個(gè)因素帶來(lái)造成的影響,但是無(wú)法保證精度。況且絕大多數(shù)國(guó)產(chǎn)的機(jī)器人系統(tǒng)都不具備這個(gè)功能,對(duì)于機(jī)器人旋轉(zhuǎn)的補(bǔ)償只能有配套的視覺(jué)系統(tǒng)來(lái)解決。
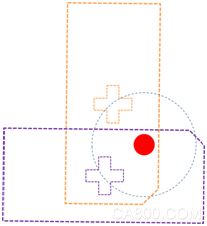
上圖中,十字線是夾具的中心,紅色點(diǎn)是機(jī)械手旋轉(zhuǎn)軸中心,從圖上可以看出,一旦工件角度發(fā)生旋轉(zhuǎn),夾具的中心就發(fā)生變化,變化的大小直接和旋轉(zhuǎn)的角度相關(guān)。不幸的是,這個(gè)紅色的旋轉(zhuǎn)中心到底在“什么地方”,沒(méi)辦法簡(jiǎn)單測(cè)量。
針對(duì)這個(gè)問(wèn)題,MicroMatch專門(mén)開(kāi)發(fā)了機(jī)械手控制模塊,根據(jù)實(shí)際項(xiàng)目的工作模式,按照先拍照再抓取,還是先抓取再拍照的不同,按照操作步驟執(zhí)行,系統(tǒng)自動(dòng)完成這兩個(gè)中心偏差的補(bǔ)償。



員產(chǎn)品")


入企業(yè)網(wǎng)站")







