- 產(chǎn)品
- 供應(yīng)
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||
機(jī)器人引導(dǎo)視覺(jué)應(yīng)用中涉及到眾多關(guān)鍵技術(shù),和視覺(jué)相關(guān)主要有以下幾個(gè)方面。
一、坐標(biāo)標(biāo)定技術(shù)(手眼標(biāo)定)
在機(jī)器人引導(dǎo)應(yīng)用中,涉及到多個(gè)坐標(biāo)系的轉(zhuǎn)換,機(jī)器人坐標(biāo)系,工具坐標(biāo)系,圖像坐標(biāo)系等。
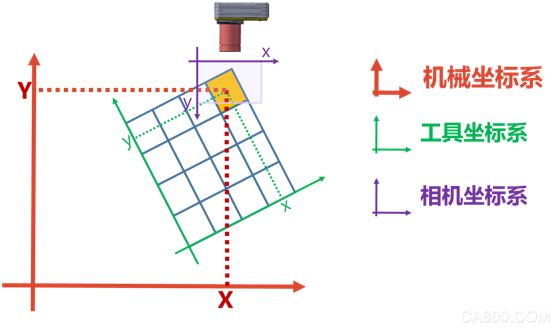
在這類應(yīng)用中,首先要確定各個(gè)坐標(biāo)系之間的對(duì)應(yīng)關(guān)系。MicroMatch智能相機(jī)提供了自動(dòng)化方法完成各個(gè)坐標(biāo)系之間的標(biāo)定。
很多視覺(jué)產(chǎn)品的自動(dòng)化標(biāo)定方法是將標(biāo)定板固定或者安裝在機(jī)器人上,這種方法在實(shí)際項(xiàng)目中具有很大的局限性。因?yàn)樵诤芏囗?xiàng)目中,尤其是高精度的場(chǎng)合,相機(jī)的拍攝位置很可能在機(jī)械手的行程之外,或者由于機(jī)械結(jié)構(gòu)設(shè)計(jì)的原因,機(jī)械手根本沒(méi)辦法運(yùn)動(dòng)到相機(jī)視場(chǎng)范圍里。
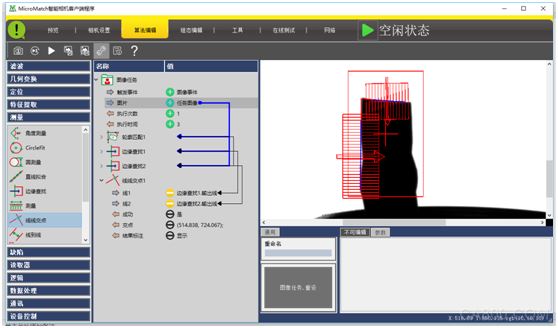
針對(duì)這些問(wèn)題,MicroMatch采用了更加靈活的標(biāo)定方案,只要讓機(jī)械手抓取一個(gè)具有明顯特征的“剛體“。只要”剛體“的一段能夠進(jìn)入相機(jī)的拍攝范圍,完成一系列指定動(dòng)作,就可以完成標(biāo)定,方便快捷。
由于機(jī)械手抓取的是“任意剛體”,沒(méi)有預(yù)先設(shè)置好的特征點(diǎn),需要借助于MicroMatch軟件先進(jìn)的算法組態(tài)功能提取特征點(diǎn)。


員產(chǎn)品")


入企業(yè)網(wǎng)站")







